University Rover Competition
The Sky is the Limit
Rover Team Overview
Welcome to the rover team on RAS! Our team designs and assembles a rover from raw material, manufactured components (gears, bearings, etc.), and pre-built electronics (motors, Arduinos, etc.). There are several systems that are being worked on for the rover. Main systems include the chassis, the arm, the science module, and autonomous control.
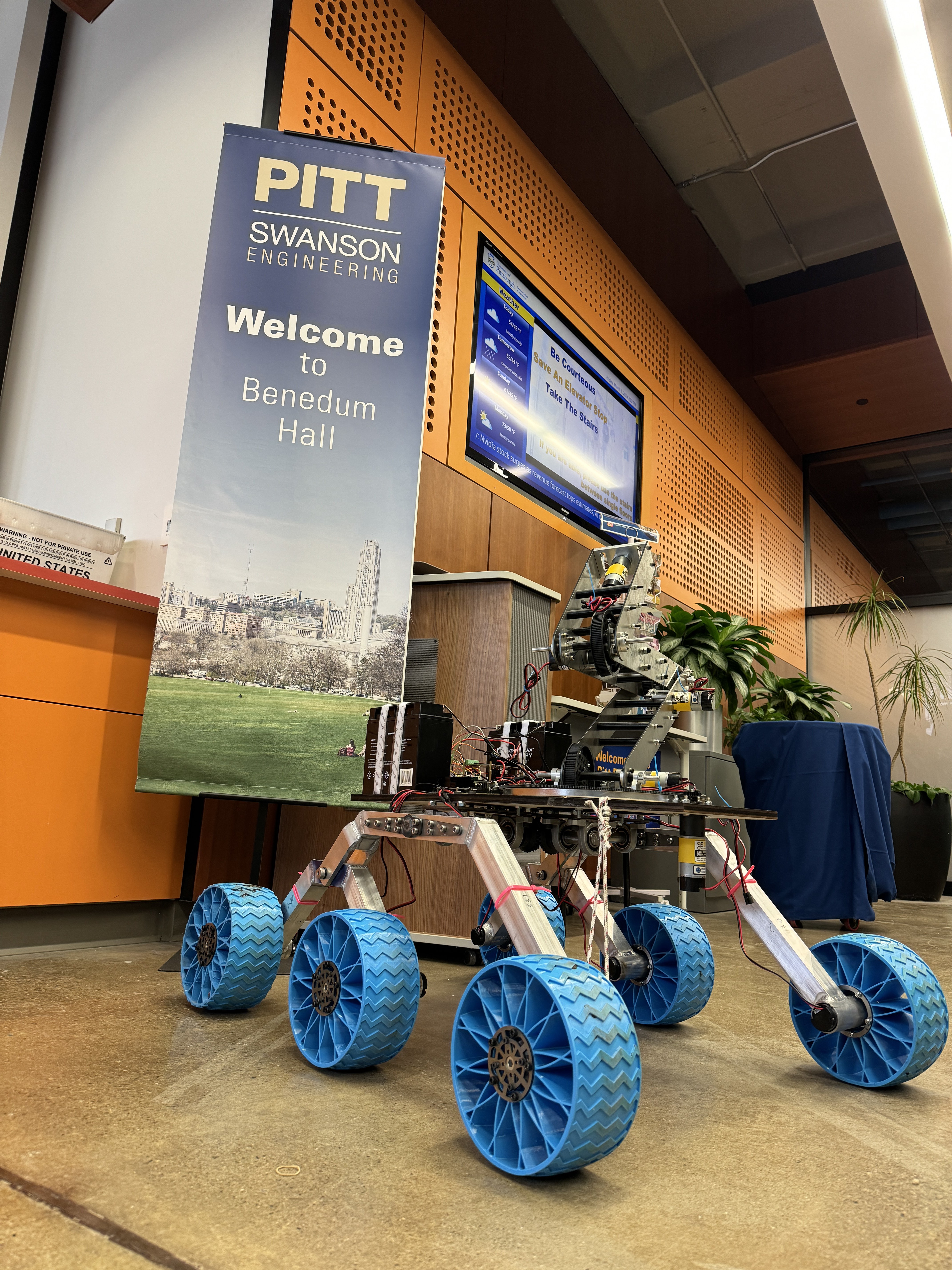
Full Rover Assembly
Design
Chassis
Our chassis is mainly constructed out of aluminum. The midsection with the differential is made rimarily out of steel as most of the weight needs to be supported. The chassis features a tank-drive design with a differential to traverse over rocky/uneven terrain. Our rover uses 6 wheels that were 3D-printed using TPU. Using TPU allowed for a more "springy" wheel for shock absorption and tread.
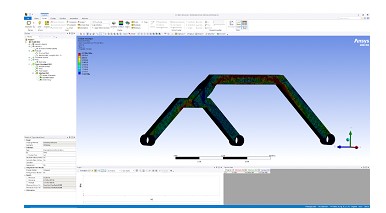
Chassis Stress Simulation
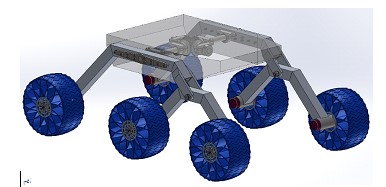
Chassis CAD
Arm
Our current plan is to go with a three-segment arm. There will also be a hand attached to the end of the arm to perform lifting/grasping tasks. The entire arm setup will be constructed on a rotating base to provide a full spherical range of motion.
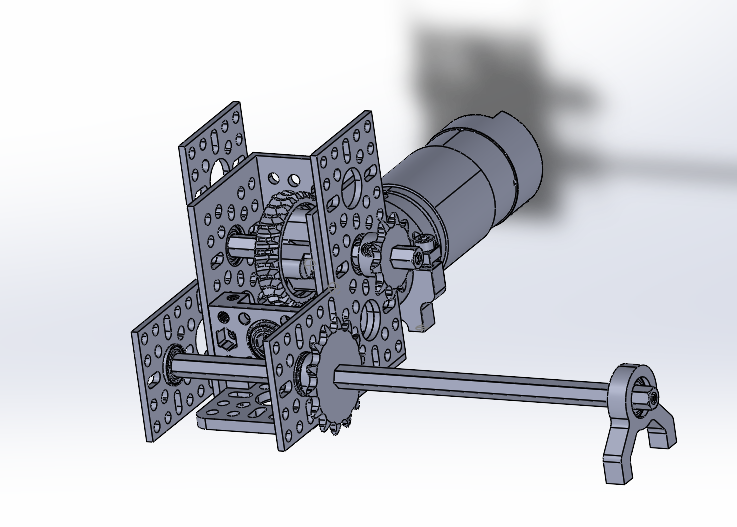
Arm Base Gearbox
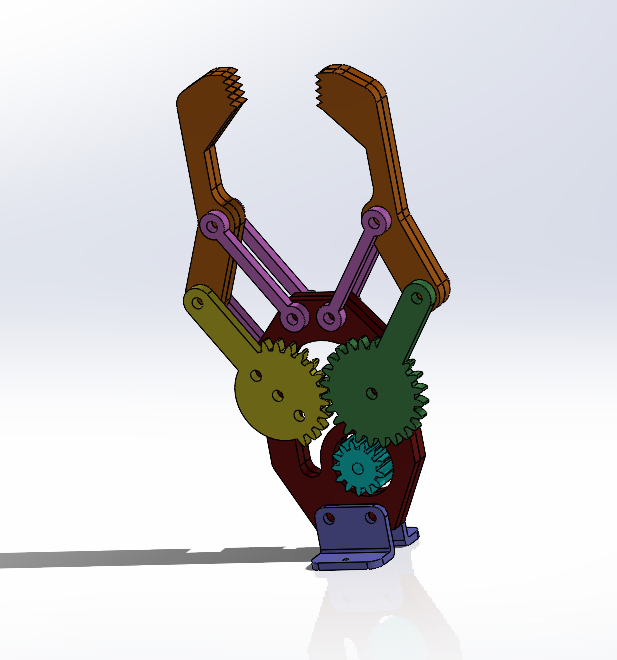
Current Hand of the Arm
Science Module
This module is intended to take "samples" (dirt or rocks) from the ground and analyze them for signs of life. Current methods of performing this analysis include GelRed and ATP Luminescence. When using GelRed, DNA signatures shine red under UV light, and ATP Luminescence requires the use of a luminometer.
Autonomous Control
Currently in development. We will be exploring camera usage, GPS usage, and LIDAR.
Control System
Control of the rover is centered around an Nvidia Jetson Nano, which serves as the primary computer. The Jetson communicates to an Arduino Microcontroller which enables execution of the Robot Operating System (ROS2). The Arduino microcontroller interfaces directly with all onboard sensory apparatus and actuation mechanisms, while the cameras are connected directly to the Jetson to leverage CUDA-accelerated processing capabilities.
University Rover Competition Overview
The University Rover Competition (URC) is an annual competition held in the desert of Utah. The competition being in Utah is the closest that students can get to simulating Mars. To get into the competition, teams have to pass two rounds of qualifiers. The top 36 teams will get to move on to the actual competition. The actual competition has four main missions:
- Delivery Mission: Assisting astronauts in the field by picking up, transporting, and delivering items.
- Equipment Servicing Mission: Perform service operations on a mock-up lander. Operations could include picking up objects, opening and closing storage devices, typing, and controlling a joystick.
- Autonomous Navigation Mission: Navigate to tagged locations without human assistance. This can be done with a camera and global positioning coordinates.
- Science Mission: Collect a sample of dirt/rock and analyze for signs of life.
URC website: https://urc.marssociety.org/home/requirements-guidelines
Leadership Information (2024-2025)
The rover project exists within the Robotics and Automation Society (RAS). We do our own work, but at the end of the day, the chief engineer of the rover team reports to the president of RAS. Below are the current leadership roles within the rover team. If you are interested in getting involved with the project, reach out to our Chief Engineer or check out our Discord: https://discord.gg/NnfQTxMyBk
- Chief Engineer: Gabriel Warriner (gfw6@pitt.edu)
- Mechanical Lead: Elliott Warriner
- Software Lead: Alexander Kwaskinski
- Treasurer: Aragya Goyal